
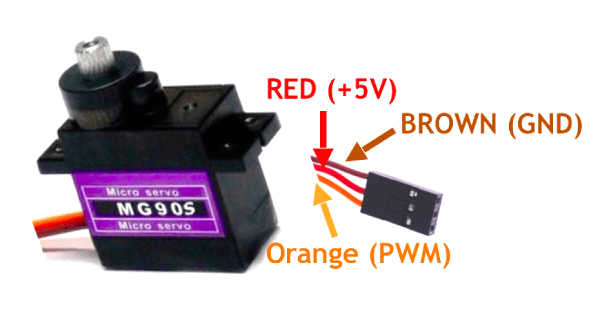
Servomotor MG90S, angrenaje metal
17,72 RON


Imaginile produselor au caracter informativ si pot prezenta diferente minore, in functie de lot si de furnizor. Este posibil ca specificatiile si pretul produselor sa fie modificate fara preaviz. Facem tot posibilul sa adaugam in pagina produselor specificatii cat mai exacte si corecte dar este posibil ca acestea sa nu fie in totalitate corecte. in cazul in care identificati un astfel de caz, va rugam sa ne semnalati acest lucru.
Produsul este destinat specialistilor si necesita personal calificat si autorizat. Produsul nu include instructiuni de asamblare/utilizare. Punerea in functiune a produsului de catre persoane necalificate duce la pierderea garantiei conform Termenilor si Conditiilor din site.
 LIVRARE GRATUITA
LIVRARE GRATUITAAdauga in cos produse in valoare de 130 Ron
 EXPEDIERE RAPIDA
EXPEDIERE RAPIDAExpediere din stoc in 24H
 DISCOUNT 5%
DISCOUNT 5%La toate comenzile minim 500 Ron
Acest servomotor reprezinta un upgrade la varianta clasica SG90 si la MG90S clasic, adaugand angrenaje din Aluminiu si fiind ideal pentru aplicatii unde aluminiul scade di greutatea servomotorului per total.
Servomotorul este unul precis, cu potentiometru intern.
Specificatii:
Greutate: 12.6g
Dimensiuni mm: 22.8 x 12.2 x 28.5mm
Cuplu in stall: 1.8kg/cm(4.8V ), 2.2kg/cm(6V)
Viteza operare: 0.1sec/60 grade (la 4.8v), 0.08sec/60 grade (la 6v)
Raza rotatie: 0 - 180 grade
Tensiune alimentare: 4.8 - 6.0VDC
Instructiuni:
Exista posibilitatea ca unele librarii sa nu actioneze servomotorul in raza lui maxima (0-180 grade). Valorile PWM variaza intre 0.4 si 2.6 milisecunde. Posibil ca unele modificari sa fie necesare in librarie daca servomotorul nu se roteste intre 0 si 180 grade.
Vezi codul de mai jos pentru a pozitiona servomotorul in pozitia 0 si 180 grade:
// the setup function runs once when you press reset or power the board
void setup() {
pinMode(9, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(9, HIGH);
delayMicroseconds(2600); //schimba aici cu 400 pentru 0 grade sau 2600 pentru 180 grade
digitalWrite(9, LOW);
delay(18);
}
Modificare librarie in cazul in care servomotorul nu actioneaza pana la 180 grade:
In folderul C:Program Files-> (x86)->Arduino->libraries->Servo->src
deschide fisierul Servo.h cu editorul de text si inlocuieste urmatoarele linii de cod:
#define MIN_PULSE_WIDTH 544 // the shortest pulse sent to a servo
#define MAX_PULSE_WIDTH 2500 // the longest pulse sent to a servo
#define DEFAULT_PULSE_WIDTH 1500 // default pulse width when servo is attached
#define REFRESH_INTERVAL 20000 // minumim time to refresh servos in microseconds
cu
#define MIN_PULSE_WIDTH 400 // the shortest pulse sent to a servo
#define MAX_PULSE_WIDTH 2600 // the longest pulse sent to a servo
#define DEFAULT_PULSE_WIDTH 1500 // default pulse width when servo is attached
#define REFRESH_INTERVAL 20000 // minumim time to refresh servos in microseconds






















